Solar energy LED beacons
What?
Powering a grid using the sun is not as straightforward as it initially seems. This is because the voltage that a solar panel outputs is proportional to sunlight intensity, which is rarely stable (especially in the UK!). Consequently, we need a way of drawing varying amounts of power based on how much is available from a panel.
One solution is using an SMPS (Switch-Mode Power Supplies), which can draw different voltages (hence currents) based on the duty cycle of a PWM signal. The duty cycle is proportion that a signal with period T seconds is on (or HIGH), and varies between 0 and 100 percent.
This also gives us the ability to either “buck” or “boost” the input voltage from the solar panels. “Buck” is a term for reducing input voltage, and “boost” means increasing the voltage. We have decided to go with the boost configuration as this allows us to charge the capacitor to a higher voltage.
The diagram below outlines the circuit’s layout:
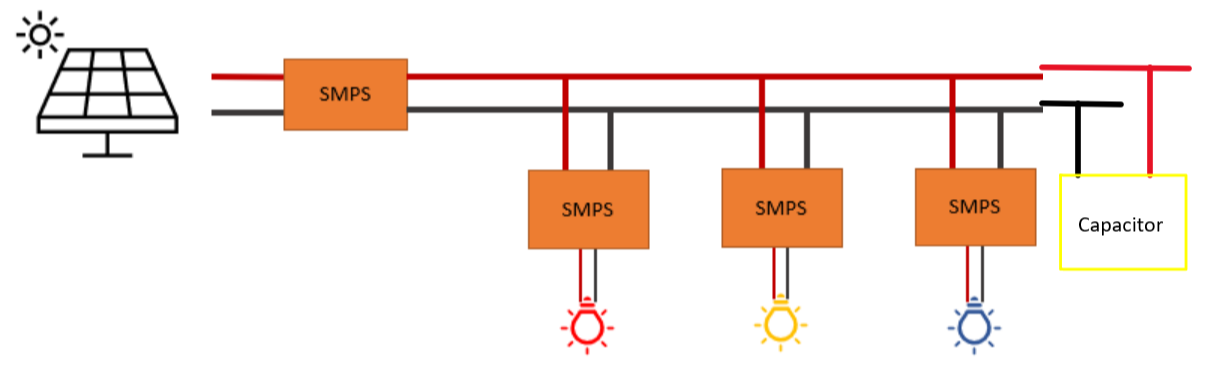
Equipment
- 5 volts, 230mA solar panel (x3)
- Buck/Boost SMPS device
- 18V, 0.25F Capacitor
- Buck SMPS with adafruit microcontroller (x3)
- Red LED
- Blue LED
- Yellow LED
- Sun?
How?
In the boost SMPS, we have implemented a type of MPPT algorithm named “perturb and observe”. This is explained in the code below. In the Buck SMPS, we implemented a PID algorithm that limits the current at the LEDs’ current ratings, to ensure that none of them break. The capacitor is directly connected to the grid, which means that the voltage of the grid will never change abruptly due to changing sunlight conditions.
/*
* Boost SMPS code
* pin6 is PWM output at 62.5kHz.
* duty-cycle saturation is set as 2% - 98%
*/
#include <Wire.h>
#include <INA219_WE.h>
INA219_WE ina219; // this is the instantiation of the library for the current sensor
float open_loop = 0.5, closed_loop; // Duty Cycles
float va,vb,vref,iL,dutyref,current_mA; // Measurement Variables
float prev_vb,prev_iL;
float del_pwr = 0,del_vb = 0,del_iL = 0;
float vb_limit;
float variable_p;
unsigned int sensorValue0,sensorValue1,sensorValue2,sensorValue3; // ADC sample values declaration
float curr_pwr,prev_pwr;
float ev=0,cv=0,ei=0,oc=0; //internal signals
float Ts=0.001; //1 kHz control frequency. It's better to design the control period as integral multiple of switching period.
float kpv=0.05024,kiv=15.78,kdv=0; // voltage pid.
float u0v,u1v,delta_uv,e0v,e1v,e2v; // u->output; e->error; 0->this time; 1->last time; 2->last last time
float kpi=0.02512,kii=39.4,kdi=0; // float kpi=0.02512,kii=39.4,kdi=0; // current pid.
float u0i,u1i,delta_ui,e0i,e1i,e2i; // Internal values for the current controller
float uv_max=4, uv_min=0; //anti-windup limitation
float ui_max=50, ui_min=0; //anti-windup limitation
float current_limit = 1.0;
boolean Boost_mode = 0;
boolean CL_mode = 0;
unsigned int loopTrigger;
unsigned int com_count=0; // a variables to count the interrupts. Used for program debugging.
float dutyCycleIncrement = 0.01; // Duty cycle adjustment step size
int count = 0;
float pwr_threshold = 0.01;
float vb_threshold = 0.01;
void setup() {
//Basic pin setups
noInterrupts(); //disable all interrupts
pinMode(13, OUTPUT); //Pin13 is used to time the loops of the controller
pinMode(3, INPUT_PULLUP); //Pin3 is the input from the Buck/Boost switch
pinMode(2, INPUT_PULLUP); // Pin 2 is the input from the CL/OL switch
analogReference(EXTERNAL); // We are using an external analogue reference for the ADC
// TimerA0 initialization for control-loop interrupt.
TCA0.SINGLE.PER = 999; //
TCA0.SINGLE.CMP1 = 999; //
TCA0.SINGLE.CTRLA = TCA_SINGLE_CLKSEL_DIV16_gc | TCA_SINGLE_ENABLE_bm; //16 prescaler, 1M.
TCA0.SINGLE.INTCTRL = TCA_SINGLE_CMP1_bm;
// TimerB0 initialization for PWM output
pinMode(6, OUTPUT);
TCB0.CTRLA=TCB_CLKSEL_CLKDIV1_gc | TCB_ENABLE_bm; //62.5kHz
analogWrite(6,120);
Serial.begin(115200); //serial communication enable. Used for program debugging.
interrupts(); //enable interrupts.
Wire.begin(); // We need this for the i2c comms for the current sensor
ina219.init(); // this initiates the current sensor
Wire.setClock(700000); // set the comms speed for i2c
}
void loop() {
if(loopTrigger) { // This loop is triggered, it wont run unless there is an interrupt
digitalWrite(13, HIGH); // set pin 13. Pin13 shows the time consumed by each control cycle. It's used for debugging.
// Sample all of the measurements and check which control mode we are in
sampling();
CL_mode = digitalRead(3); // input from the OL_CL switch
Boost_mode = digitalRead(2); // input from the Buck_Boost switch
if (Boost_mode){
if (CL_mode) { //Closed Loop Boost
pwm_modulate(1); // This disables the Boost as we are not using this mode
}else{ // Open Loop Boost
current_limit = 2; //
oc = iL-current_limit; // Calculate the difference between current measurement and current limit
if ( oc > 0) {
open_loop=open_loop+0.001; // We are above the current limit so less duty cycle
} else {
open_loop=open_loop-0.001; // We are below the current limit so more duty cycle
}
vb_limit = 17;
if((vb-vb_limit) > 0){
open_loop += 0.1;
}
open_loop=saturation(1-open_loop,0.99,0.29); // saturate the duty cycle at the reference or a min of 0.01
pwm_modulate(open_loop); // and send it out
curr_pwr = iL*vb; //calculated power in this instance
del_pwr = curr_pwr - prev_pwr; //calculate power difference
del_vb = vb - prev_vb; // calculate voltage difference
if(del_pwr != 0){
if(del_pwr > 0){
if(del_vb < 0){
open_loop -= 0.01;
}
else{
open_loop += 0.01;
}
}
else{
if(del_vb < 0){
open_loop += 0.01;
}
else{
open_loop -= 0.01;
}
}
}
else{
//do nothing
}
open_loop=saturation(1 - open_loop,0.99,0.29); // saturate the duty cycle between 0.99 and 0.29
pwm_modulate(open_loop); // and send it out
variable_p = prev_pwr; // for debugging
prev_pwr = curr_pwr;
prev_vb = vb;
}
}else{
if (CL_mode) { // Closed Loop Buck
pwm_modulate(1); // This disables the Buck as we are not using this mode
}else{ // Open Loop Buck
pwm_modulate(1); // This disables the Buck as we are not using this mode
}
}
com_count++; //used for debugging.
if (com_count >= 10) { //send out data every second.
Serial.print("Va: ");
Serial.print(va);
Serial.print("\t");
Serial.print("Vb: ");
Serial.print(vb);
Serial.print("\t");
Serial.print("Inductor Current: ");
Serial.print(iL);
Serial.print("\t\t");
Serial.print("Boost Mode: ");
Serial.print(Boost_mode);
Serial.print("\t\t");
Serial.print("CL Mode: ");
Serial.print(CL_mode);
Serial.print("\t\t");
Serial.print("Duty(inverted): ");
Serial.print(1-open_loop);
Serial.print("\t\t");
Serial.print("Curr_pwr: ");
Serial.print(curr_pwr);
Serial.print("\t\t");
Serial.print("Iout: ");
Serial.print(curr_pwr/va);
Serial.print("\t\t");
Serial.print("prev_pwr: ");
Serial.print(variable_p);
Serial.print("\n");
com_count = 0;
}
prev_pwr = curr_pwr;
digitalWrite(13, LOW); // reset pin13.
loopTrigger = 0;
}
count += 1;
}
// Timer A CMP1 interrupt. Every 800us the program enters this interrupt.
// This, clears the incoming interrupt flag and triggers the main loop.
ISR(TCA0_CMP1_vect){
TCA0.SINGLE.INTFLAGS |= TCA_SINGLE_CMP1_bm; //clear interrupt flag
loopTrigger = 1;
}
// This subroutine processes all of the analogue samples, creating the required values for the main loop
void sampling(){
// Make the initial sampling operations for the circuit measurements
sensorValue0 = analogRead(A0); //sample Vb
sensorValue2 = analogRead(A2); //sample Vref
sensorValue3 = analogRead(A3); //sample Va
current_mA = ina219.getCurrent_mA(); // sample the inductor current (via the sensor chip)
// Process the values so they are a bit more usable/readable
// The analogRead process gives a value between 0 and 1023
// representing a voltage between 0 and the analogue reference which is 4.096V
vb = sensorValue0 * (12400/2400) * (4.096 / 1023.0); // Convert the Vb sensor reading to volts
vref = sensorValue2 * (4.096 / 1023.0); // Convert the Vref sensor reading to volts
va = sensorValue3 * (12400/2400) * (4.096 / 1023.0); // Convert the Va sensor reading to volts
// The inductor current is in mA from the sensor so we need to convert to amps.
// We want to treat it as an input current in the Boost, so its also inverted
// For open loop control the duty cycle reference is calculated from the sensor
// differently from the Vref, this time scaled between zero and 1.
// The boost duty cycle needs to be saturated with a 0.33 minimum to prevent high output voltages
if (Boost_mode == 1){
iL = -current_mA/1000.0;
dutyref = saturation(sensorValue2 * (1.0 / 1023.0),0.99,0.33);
}else{
iL = current_mA/1000.0;
dutyref = sensorValue2 * (1.0 / 1023.0);
}
}
float saturation( float sat_input, float uplim, float lowlim){ // Saturatio function
if (sat_input > uplim) sat_input=uplim;
else if (sat_input < lowlim ) sat_input=lowlim;
else;
return sat_input;
}
void pwm_modulate(float pwm_input){ // PWM function
analogWrite(6,(int)(255-pwm_input*255));
}
/*end of the program.*/
Below is the BUCK smps code for the LED’s:
# Developed by Aymen Jaber and Sakhwat
from machine import Pin, ADC, PWM
vret_pin = ADC(Pin(26))
vout_pin = ADC(Pin(28))
vin_pin = ADC(Pin(27))
pwm = PWM(Pin(0))
pwm.freq(100000)
pwm_en = Pin(1, Pin.OUT)
count = 0
pwm_out = 0
pwm_ref = 1000
setpoint = 0.0
delta = 100
I_min = 0.075 # this is different for various LED colours
I_max = 0.3 # so does this one
# Define the reference voltage of the ADC (adjust as per your system)
ADC_REFERENCE_VOLTAGE = 3.3
def adc_to_voltage(adc_value):
return (adc_value / 65535) * ADC_REFERENCE_VOLTAGE # convert digital reading to voltage
def voltage_to_adc(voltage_value):
return (voltage_value * 65535) / ADC_REFERENCE_VOLTAGE # convert voltage reading to digital
def saturate(duty): #limit duty cycle to protect LED drivers
if duty > 62500:
duty = 62500
if duty < 100:
duty = 100
return duty
def current_limiter(vret, pwm_ref,I_max): # Used to limit current based on I_max
if vret >= I_max:
pwm_ref = pwm_ref + delta
elif vret <= I_min:
pwm_ref = pwm_ref - delta
else:
pwm_ref = pwm_ref
#return pwm_ref
#PID control variables
# This also varies between LED colours
kpi = 0.5
kdi = 0
kii = 0.1
def pidi(pid_input)
e_integration = 0 #initalises e_integration value
global e1i,e2i #creates global variable that store the previous values
e0i = 0.07 - vret
e_integration = e0i
u1i = vret
e2i = e1i
e1i = pid_input
#anti-windup
if u1i >= I_max
e_integration = 0
elif u1i <= I_min
e_integration = 0
delta_ui = kpi * (e0i - e1i) + kii * Ts * e_integration + kdi / Ts * (e0i - 2 * e1i + e2i)
u0i = u1i + delta_ui
return u0i
while True:
pwm_en.value(1)
vin_bin = vin_pin.read_u16()
vout_bin = vout_pin.read_u16()
vret_bin = vret_pin.read_u16()
vin = adc_to_voltage(vin_pin.read_u16()) #This reads the pins in volts rather than binary
vout = adc_to_voltage(vout_pin.read_u16())
vret = adc_to_voltage(vret_pin.read_u16())
count = count + 1
maxpower = vret * vret
#I_max = maxpower / vout
pwm_ref = 25000
pwm_out = saturate(pwm_ref)
pwm.duty_u16(pwm_out)
current_limiter(vret, pwm_out/62500,I_max)
pwm_out = int(pidi(vret) * 62500)
for
if count > 2000:
print("Vin = {:.0f}".format(vin))
print("Vout = {:.0f}".format(vout))
print("Vret = {:.0f}".format(vret))
print("Duty = {:.0f}".format(pwm_out))
print("Bin Vin = {:.0f}".format(vin_bin))
print("Bin Vout = {:.0f}".format(vout_bin))
print("Bin Vret = {:.0f}".format(vret_bin))
count = 0
Results
To test the sytem out, I simulated the solar panels using a variable power supply. This is more reliable than using the sun as we can directly control voltage levels.
When the voltage increases, I saw that the boost SMPS was drawing more power. Likewise, when voltage decreases the SMPS draws less power. At the same time, the LED’s worked well when connected to the grid, proving the system to be reliable.
After multiple tests, we saw that the LED’s lasted for a maximum of 20 seconds when voltage is zero.
Below is a video showcasing the system:
And outside with the real panels: